Scientists developed a legged small celestial body landing mechanism for landing simulation and experimental test
Landing stably is the precondition for exploring the small celestial body in situ. The surface of small body is weak gravity and irregular, and the surface environment is unknown and uncertain. The landing mechanism tends to rebound and turn over, and the landing stability time is long. However, there is difference on the Moon and the Mars surface while most of the landing performance researches are focused on the lunar landing so far. Therefore, it is of great important to study the landing performance in different conditions to analyze the landing stability boundary, and to propose reasonable landing suggestions to support the small celestial body exploration of China. In a research article recently published in Space: Science & Technology, researchers from Beijing Institute of Spacecraft System Engineering, Harbin Institute of Technology, and Polytechnic University of Milan establish the simulation model of the landing mechanism in different landing conditions, analyze the sensitivity of the key parameters affecting the landing performance, and verify correctness of the simulation by experimental tests, which can provide suggestions for the landing mechanism land stably on the small celestial body.
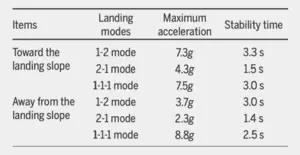
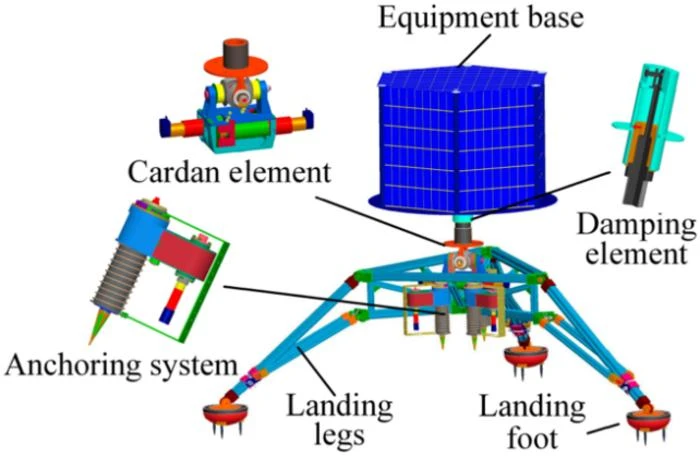
First, authors briefly repeat the landing mechanism and the landing simulation. The small celestial body landing mechanism used in the simulation contains landing foot, landing legs, cardan element, damping element, equipment base, and so on (Fig. 1). In simulation, two scenarios are taken into consideration, namely (1) The landing mechanism lands toward the landing slope with Vx > 0 and (2) The landing mechanism lands away from the landing slope with Vx < 0. In each scenario, three landing modes are classified according to the contact order between the landing foot and the landing slope, i.e. (a) 1-2 landing mode, (b) 2-1 landing mode, and (c) 1-1-1 landing mode (with 30° yaw angle). For all landing modes in both simulation scenarios, the landing mechanism turnover is prevented by the retro-rocket, and there is no sliding of the landing feet. Detailed landing performances are summarized in Table 1. The maximum overloading acceleration of the equipment base is less than 10 g, and the landing stability time is less than 4 s. It shows that the landing mechanism can land safely in different landing conditions. Additionally, when Vx > 0, it can be fund that the 2-1 mode has the best landing performance among three modes, and 1-2 and 1-1-1 modes’ landing performances are similar. When Vx < 0, the landing performance of the 2-1 mode is the best, the 1-2 mode is in general, and the 1-1-1 mode is the worst.
Secondly, key factors affecting the landing performance are analyzed. (1) Cardan element damping (c2). The landing stabilization time is significantly shortened and the overloading acceleration is weakened when c2 is variable in comparison to constant c2. The landing mechanism has better landing performance when c2 is variable. (2) Foot anchors. The foot anchors affect the friction coefficient between landing feet and the landing surface. Slipping induces the landing mechanism far away from the landing point, which would affect the anchorage of the anchoring system. Friction between the landing mechanism and the landing surface should be high to avoid sliding of the landing mechanism. Overturning of landing mechanism due to high friction can be eliminated by retro-rocket thrust. Therefore, it is helpful to design foot anchors on the landing mechanism, as it can penetrate the landing surface and prevent or weaken sliding of the landing mechanism. (3) Retro-rocket thrust. Retro-rocket thrust can prevent the landing mechanism from bouncing or turning, thus the retro-rocket thrust is helpful for landing successfully. (4) Landing slope. The larger the slope angle is, the higher the turning angular velocity of landing legs is, and the longer the landing stabilization time is. The influence of slope angle on equipment base overloading acceleration is not obvious. Therefore, the landing surface with smaller slope angle should be selected to reduce the landing stabilization time. (5) Landing Attitude. When the landing mechanism lands in different landing attitudes within the allowable landing velocity, the maximum overloading acceleration is less than 10g and the landing stabilization time is less than 5 s. Landing performance is good. When the yaw angle is 60° (that is, the 2-1 landing mode), the landing mechanism has the minimum overloading acceleration and the shortest landing stability time, and the landing performance is the best.
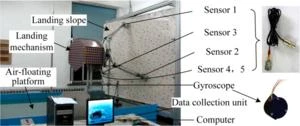
Then, the validity of the simulation model is verified by tests. These tests are carried out on the air-floating platform. The landing accelerations are measured by acceleration sensors. The landing attitude of the landing mechanism and the location of the sensors are shown in Fig. 2. Tests of landing on a 30° slope in the 1-2 mode, the 1-2 mode, and the 1-1-1 mode are conducted separately. These landing modes and velocities are imported into the simulation model. Landing performances between test and simulation are compared. The overloading acceleration of the equipment base obtained by simulation is close to that obtained by test, and the simulation result is slightly larger than the test. This is due to the mechanical flexibility of the landing mechanism, which will produce flexible deformation in the test and absorb part of the impact load. The changes of landing leg turnover angular velocity and turnover angle in simulation and test are relatively consistent. But at the time between about 0.7 and 2.5 s in the 1-2 mode, about 0.5 and 2 s in the 2-1 mode, and for the while course in 1-1-1 mode the landing leg turnover angle in test is less than that in simulation. The reason is that landing surface in test is hard wood and the foot anchors fail to penetrate the hard wood, which results in slight slip of the landing mechanism. In addition, it is found that the 2-1 landing mode has the shortest stability time, and there is no obvious relationship between the overloading acceleration and the landing mode.
Finally, authors come to the conclusion that the following methods are helpful to improve landing performance: (a) Three legs landing mechanism should preferentially choose the 2-1 landing mode. (b) Adjustable damping corresponding to landing conditions is helpful to improve the landing stability. (c) Foot anchors can reduce landing slip and shorten landing stabilization time. (d) Retro-rocket on top of the landing mechanism can weaken or prevent rebounding when landing. (e) The landing mechanism should preferentially land on flat areas.
END