Knot-inspired optical sensors for slip detection and friction measurement in dexterous robotic manipulation
A new publication from Opto-Electronic Advances, 10.29026/oea.2023.230076 discusses knot-inspired optical sensors for slip detection and friction measurement in dexterous robotic manipulation.
Hands possess an awe-inspiring ability to perceive friction forces with remarkable accuracy, all thanks to the mechanical receptors nestled within skin. This natural gift allows objects to be handled deftly and tools to be wielded effortlessly, infusing daily life with a delightful flexibility. But what if this tactile prowess could be unlocked in robots?
Imagine a world where robots possess the uncanny ability to detect and understand friction and slip, just like we do. This tantalizing concept fuels the pursuit of flexible tactile detection, a cutting-edge field that aims to equip robots with a sense of touch akin to our own. By delicately navigating the intricate landscape of friction, robots could conquer diverse operations with precision and grace.
While strides have been made, the development of flexible 3D force sensors is still wobbling through its research stage. Unlike their rigid beam-based counterparts, these sensors hold incredible promise, capable of conforming to various surfaces and executing tasks requiring finesse. However, researchers are still grappling with the challenges from complex structures, intricate decoupling methods, and inconsistent performance.
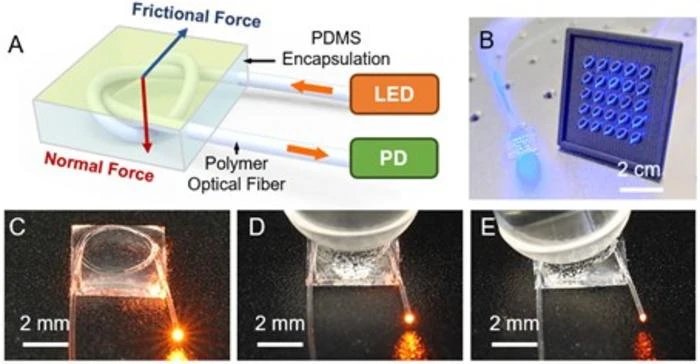
Drawing inspiration from knots, an interesting idea presents itself - polymer optical fiber knots. The knot's three-dimensional structure breaks the fiber's original circular symmetry, redistributing the load on the fiber surface. In turn, this empowers individual fiber units to respond uniquely to force stimuli from different directions, promising the creation of intricate 3D force sensing devices.
Polymer optical fibers boast a host of advantages: compactness, robustness, simplified fabrication processes, and cost-effectiveness. This study unravels their responses to directional forces and demonstrates their potential for 3D force measurement. Building upon this knowledge, an array of fiber knots is meticulously designed and brought to life, enabling successful 3D force detection. By integrating these sensors at a robot's fingertips, tactile information including pressure, friction and slips becomes accessible. The robotic hand can leverage this intelligence to flawlessly execute advanced tasks such as adaptive grasping and tool manipulation.
This work introduces a new strategy in the construction of 3D force sensors through the combination of knots and optical fibers. By analyzing the structure mechanics of the knot, researchers have successfully improved the sensing performance for pressure, friction and slips. This approach simplifies the system complexity and overcomes computational challenges associated with signal decoupling.
The integration of a change point detection algorithm enables real-time data processing and selection, resulting in a tactile feedback system for robotic manipulation. This system measures the normal and shear forces, and detects slips, allowing robots to adaptively grasp objects and manipulate tools. Demonstrations presented in this article include the adaptive grasping of moving objects and the dexterous manipulation of a knife and a key with a two-fingered robotic hand.
The use of polymer optical fiber makes the knot sensor lightweight, flexible, and inexpensive. The non-metallic nature of the sensor makes it immune to electromagnetic interference. The fabrication process is straightforward and does not require sophisticated micro/nano-processing techniques, significantly lowering the barrier for sensor production.
Furthermore, the polymer optical fibers not only serve as sensing elements but also act as signal transmission channels. This feature simplifies the signal acquisition process of the sensor array, which is beneficial to system integration. Additionally, a single polymer optical fiber can be used to create multiple fiber knots, allowing for additional functions through the incorporation of functional materials or strategies such as multi-wavelength signal multiplexing.
# # # # # #
The research team is affiliated with the Research Center for Humanoid Sensing in Zhejiang Lab, Hangzhou, China. The team is dedicated to developing multimodal tactile perception systems based on micro/nanofibers. Their research spans from ultra-sensitive pressure and tensile sensors, high-resolution temperature sensors, rapid-response humidity sensors, tactile material recognition systems based on machine learning, to flexible control systems for robotic hands using tactile feedback. The team consists of 15 members with diverse backgrounds in optics, electronics, materials, mechanics, and industrial design. They have published over 20 research articles in Nature Communications, Advanced Materials, Opto-Electronic Advances and so on. Additionally, they have obtained more than 30 national patents and have undertaken research projects funded by the National Natural Science Foundation of China, Zhejiang Provincial Key R&D Program, and Zhejiang Lab.
# # # # # #
Opto-Electronic Advances (OEA) is a high-impact, open access, peer reviewed monthly SCI journal with an impact factor of 14.1 (Journal Citation Reports for IF2022). OEA is indexed in SCI, EI, DOAJ, Scopus, CA and ICI databases.
The journal is published by The Institute of Optics and Electronics, Chinese Academy of Sciences, aiming at providing a platform for researchers, academicians, professionals, practitioners, and students to impart and share knowledge in the form of high quality empirical and theoretical research papers covering the topics of optics, photonics and optoelectronics.
# # # # # #
More information: http://www.oejournal.org/oea
Editorial Board: http://www.oejournal.org/oea/editorialboard/list
All issues available in the online archive (http://www.oejournal.org/oea/archive).
Submissions to OEA may be made using ScholarOne (https://mc03.manuscriptcentral.com/oea).
ISSN: 2096-4579
CN: 51-1781/TN
Contact Us: oea@ioe.ac.cn
Twitter: @OptoElectronAdv (https://twitter.com/OptoElectronAdv?lang=en)
WeChat: OE_Journal
# # # # # #
Pan J, Wang Q, Gao SK, Zhang Z, Xie Y et al. Knot-inspired optical sensors for slip detection and friction measurement in dexterous robotic manipulation. Opto-Electron Adv 6, 230076 (2023). doi: 10.29026/oea.2023.230076
# # # # # #
END

