Scientist proposed a research on space noncooperative target trajectory tracking based on maneuvering parameter estimation
Firstly, the authors briefly describe two models for tracking the maneuvering trajectories of non-cooperative space targets: the relative dynamics model and the indirect measurement model. In the relative dynamics model, tracking the maneuvering trajectory of the target is modeled as a problem of tracking the target's position over short discrete time intervals. On the other hand, the indirect measurement model transforms radar-derived values directly into measurements in the Local Vertical Local Horizontal (LVLH) coordinate system.
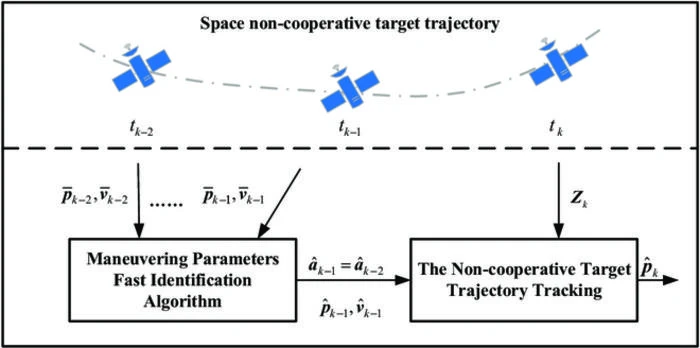
Next, the authors address the tracking problem of targets with complex maneuvering models and high frequency observation, proposing a real-time maneuver trajectory tracking method based on the rapid estimation of non-cooperative target parameter estimation. The block diagram of trajectory tracking algorithm. is illustrated in Figure 2. By selecting discrete nodes tk − 2, tk − 1, and tk at high-frequency observations, the relative position and velocity of the non-cooperative target are obtained in real-time. At each node, utilizing historical observation data and maneuver parameter estimates, the algorithm predicts the target's relative position pk at the next node tk. The assumption is made that the maneuver parameters remain unchanged within the discretization period, allowing for complete relative state information at tk − 1. The discrete trajectory tracking algorithm predicts the target's position to track the maneuvering trajectory. This process is repeated at different nodes, achieving effective tracking of the continuous maneuvering trajectory based on measurement data. However, historical measurement errors can affect the identification of the target's acceleration. To mitigate the impact of measurement errors on target acceleration identification, a mean filtering method is applied to smooth the historical measurements over the period from tk − 2 to tk − 1. Considering that non-cooperative target maneuver parameters satisfy three-axis acceleration constraints, an estimation of maneuver parameters is generated using a shooting method to ensure a uniform distribution within the constraint range. The target's relative state at time tk − 1 is obtained through numerical integration. The differential algebra method is employed to solve the computational burden of the Monte Carlo method, ensuring the efficiency of the real-time tracking process. The process of the maneuvering parameter fast identification algorithm is illustrated in Figure 3. This method initially selects the nominal state X1k−2 and defines the associated state deviation as △x, where each state can be described by adding deviation values to the nominal state. Then, a Taylor expansion is performed near the nominal state X1k−2. Utilizing the Runge-Kutta integrator, the state at time tk − 2 is mapped to tk − 1, resulting in a semi-analytical polynomial solution [Xik−1]. By comparing the error of the estimated value and the measured value, the best estimate state Xk−1 is obtained. Finally, the optimal estimate value ak−2 for the target's maneuver parameters from tk − 2 to tk − 1 is obtained through Xk−1[key]. The entire process is implemented through the Jet Transport algorithm for polynomial form numerical calculations, ensuring a reduced computational burden during real-time tracking.
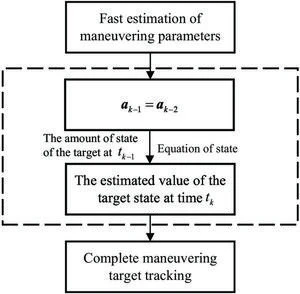
Furthermore, the process of the discrete trajectory tracking algorithm for the space noncooperative target is shown in Fig.4. Considering that the trajectory discretization period interval of the noncooperative target is short, it is assumed that the maneuvering parameters of the target in 2 consecutive periods are equal. Therefore, by solving equations, the relative state xk − 1 of the target is obtained. Using the state transition matrix F and parameters θ, the target's relative state xk at time tk is calculated, achieving the trajectory tracking of the target.
Next, to evaluate the algorithm's performance, the authors conducted simulations for non-cooperative target tracking and analyzed the tracking errors and time costs of the proposed method compared to the interactive multimodel method (IMM). Simulation conditions included the orbital parameters and initial relative states of the non-cooperative target, with a discrete trajectory tracking period of 0.5 seconds using an onboard radar sensor measurement model. Gaussian white noise with zero mean was set as the measurement noise, and 2000 acceleration shots were considered. The IMM algorithm was applied with two models, and 200 sets of repeated experiments were conducted under the same conditions.
The maneuvering trajectory of the non-cooperative target was divided into three stages and simulated in the LVLH coordinate system, including the real trajectory and measured trajectory. The results indicate that the proposed algorithm exhibits a significant advantage over the IMM algorithm in terms of trajectory tracking accuracy. The Root Mean Square Error (RMSE) of position estimates shows that the performance of the proposed algorithm is significantly better than the IMM algorithm in all three directions. The average RMSE of position estimates for the three axes increased by 94.37%, 93.53%, and 93.75%, respectively, as shown in Table 2. Additionally, Fig.7 demonstrates the superior performance of the proposed algorithm in terms of acceleration estimation. Furthermore, the authors conducted a detailed analysis of simulation results, including the average RMSE of position estimates, the performance of target acceleration estimation, and the algorithm's runtime. The experiments indicate that the proposed method not only excels in tracking performance but also satisfies the constraints of real-time maneuver trajectory tracking, despite the higher computational cost compared to the IMM algorithm. In summary, for non-cooperative targets with high maneuvering frequencies, the proposed algorithm demonstrates better performance in maneuver tracking problems.
In conclusion, the authors summarized their work and highlighted two innovative aspects of the study: (a) They proposed a rapid target maneuver acceleration estimation method based on the differential algebra approach, avoiding the delayed response of traditional filtering algorithms to large maneuvering target trajectories. Compared to the IMM method, the proposed algorithm provides a more accurate estimation of the target's maneuver acceleration, closely resembling the actual maneuvering process of the target. (b). The method achieves target tracking through trajectory discretization, rapid maneuver parameter estimation, and trajectory prediction. In comparison to IMM, the proposed algorithm is more accurate, with a trajectory tracking accuracy improvement of approximately 93.07%.
END